中国科学院大学学报 ›› 2026, Vol. 43 ›› Issue (2): 277-287.DOI: 10.7523/j.ucas.2024.063
• 简报 • 上一篇
薛仁魁1, 张杰2( ), 李斌3, 李萌1, 吴洋1
), 李斌3, 李萌1, 吴洋1
Renkui XUE1, Jie ZHANG2(), Bin LI3, Meng LI1, Yang WU1
摘要:
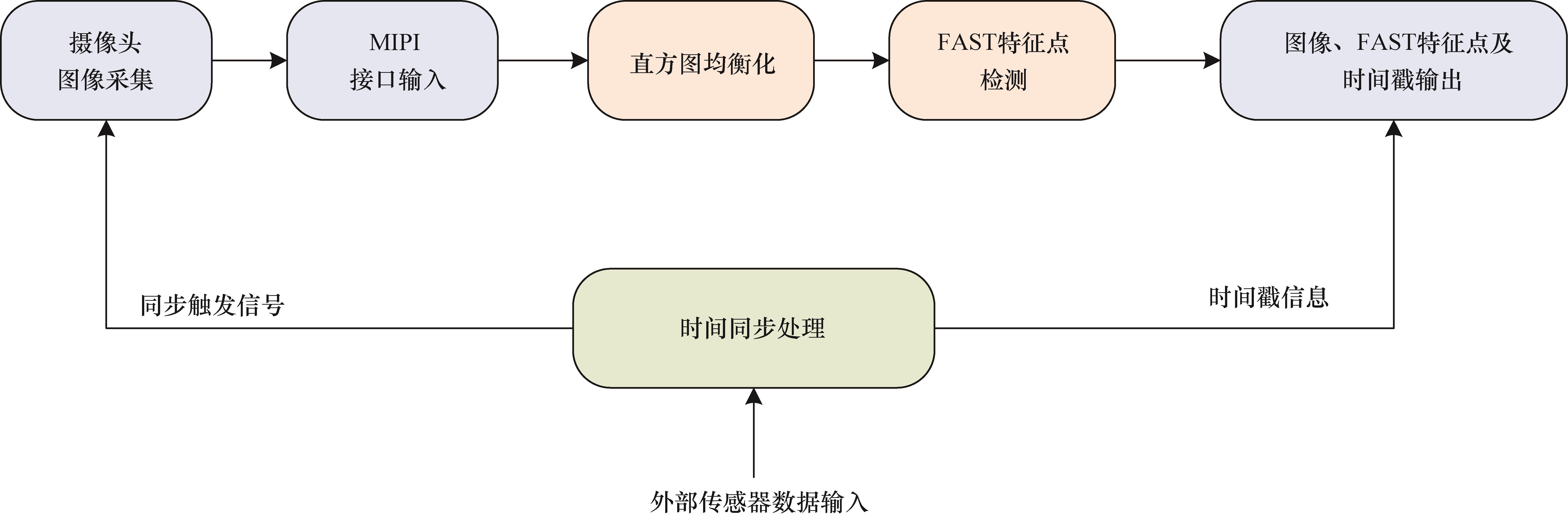
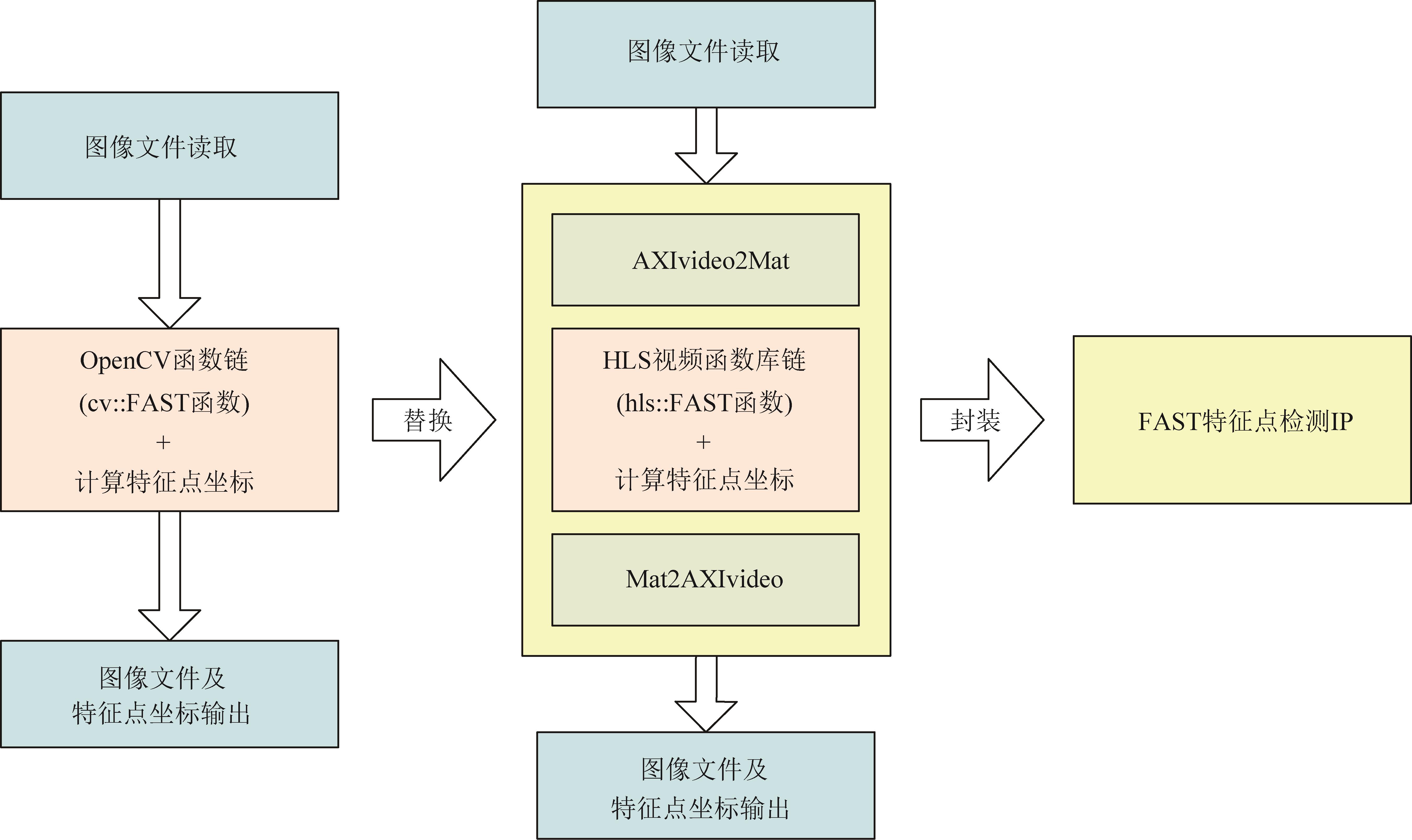
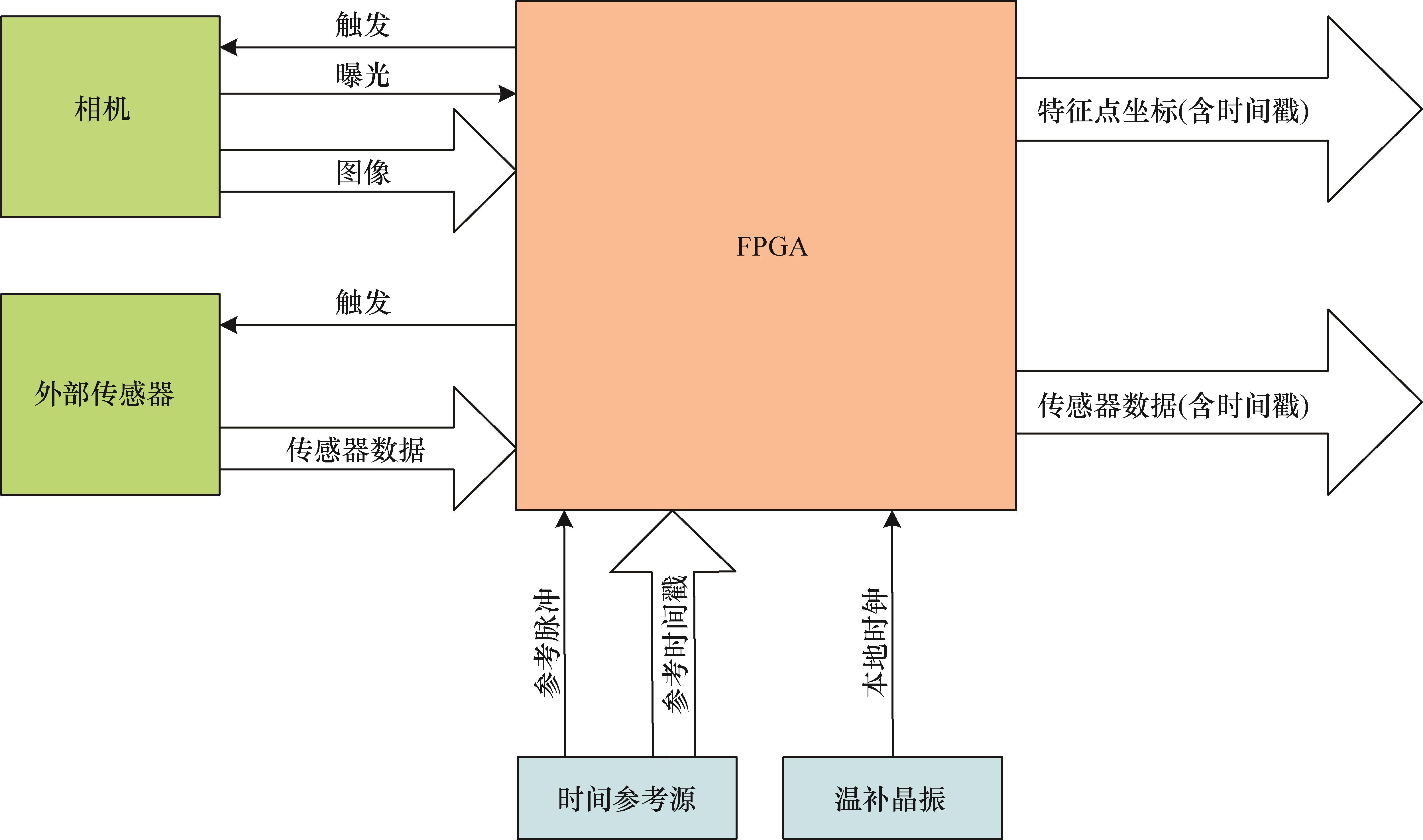
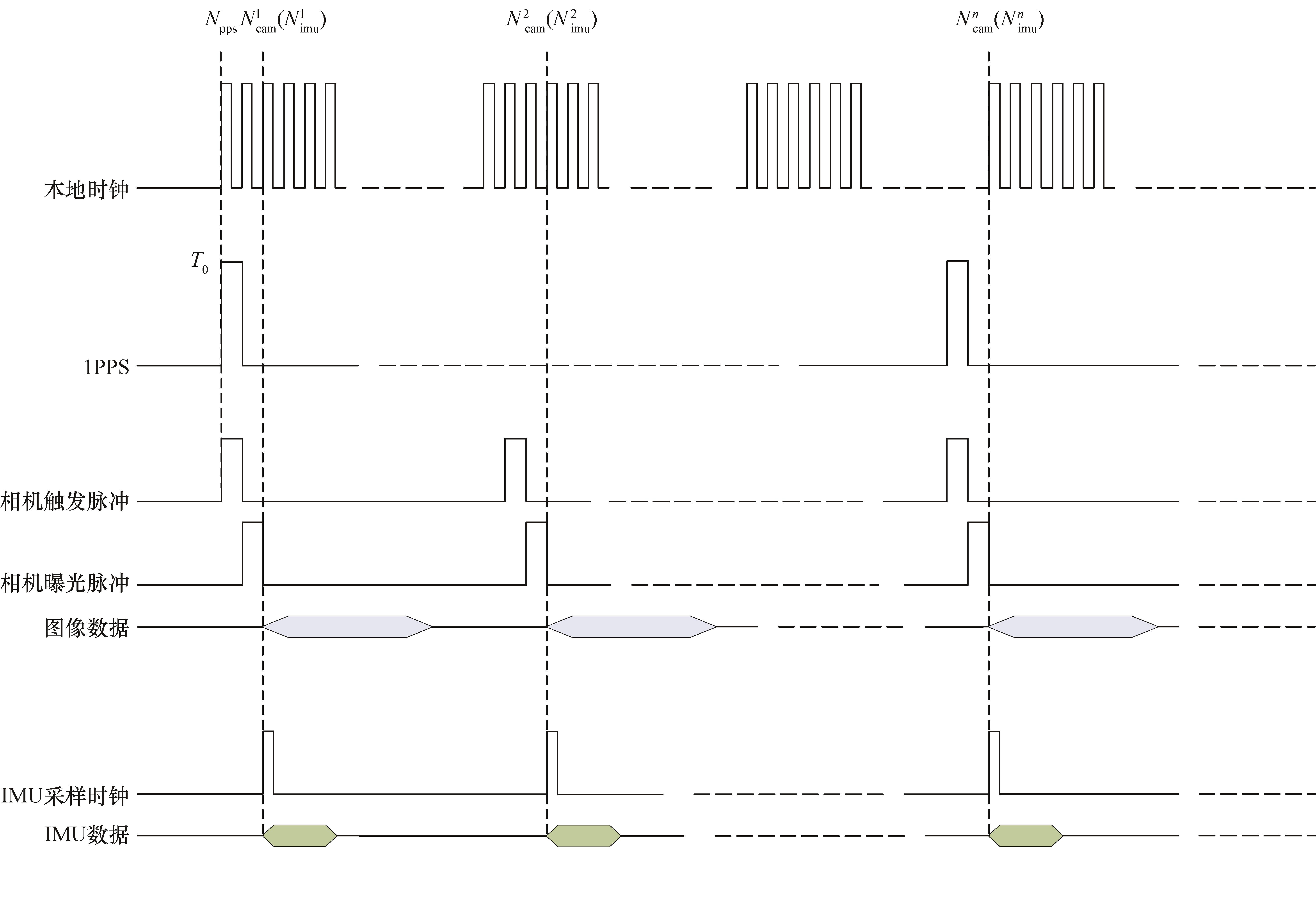
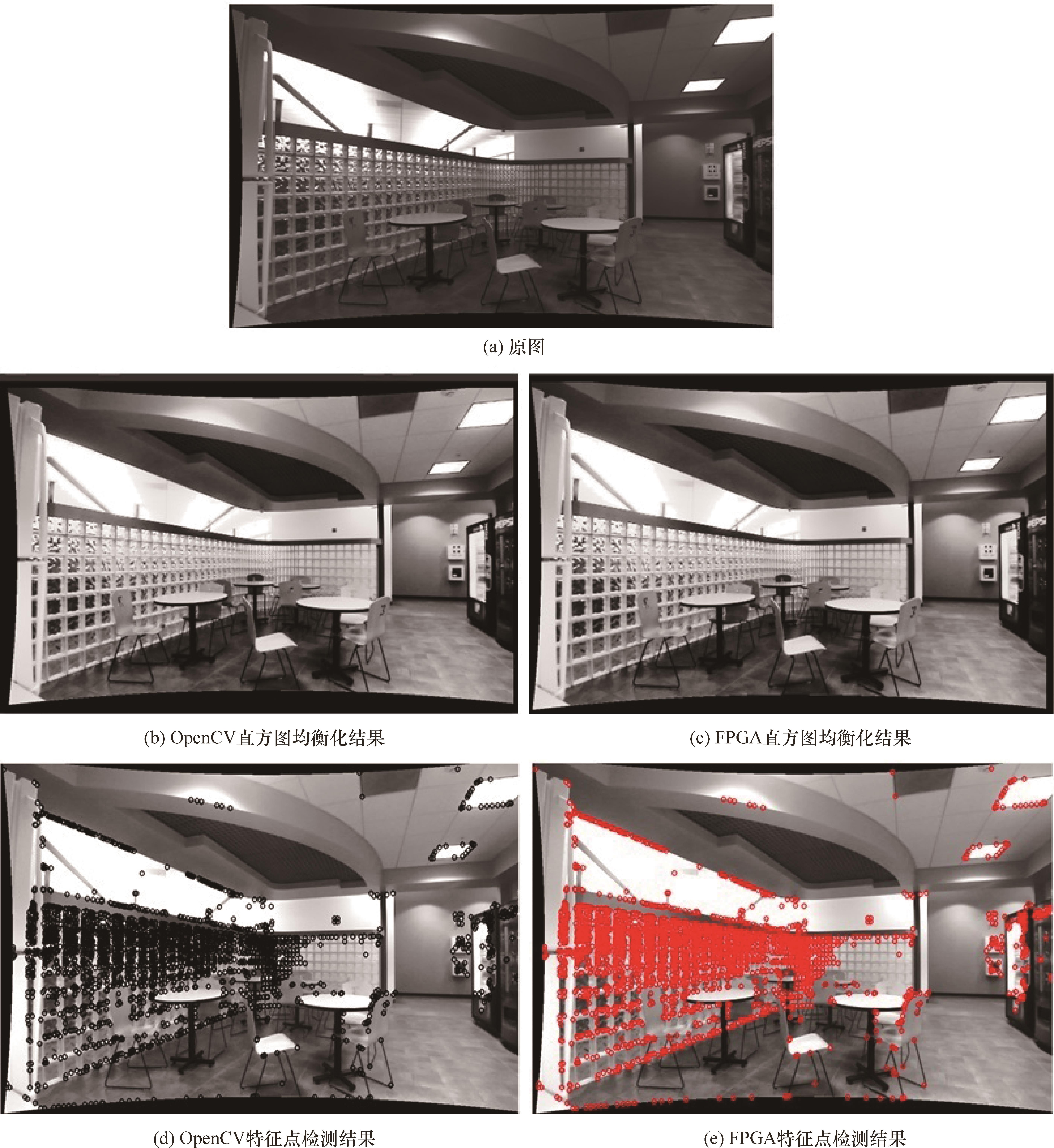
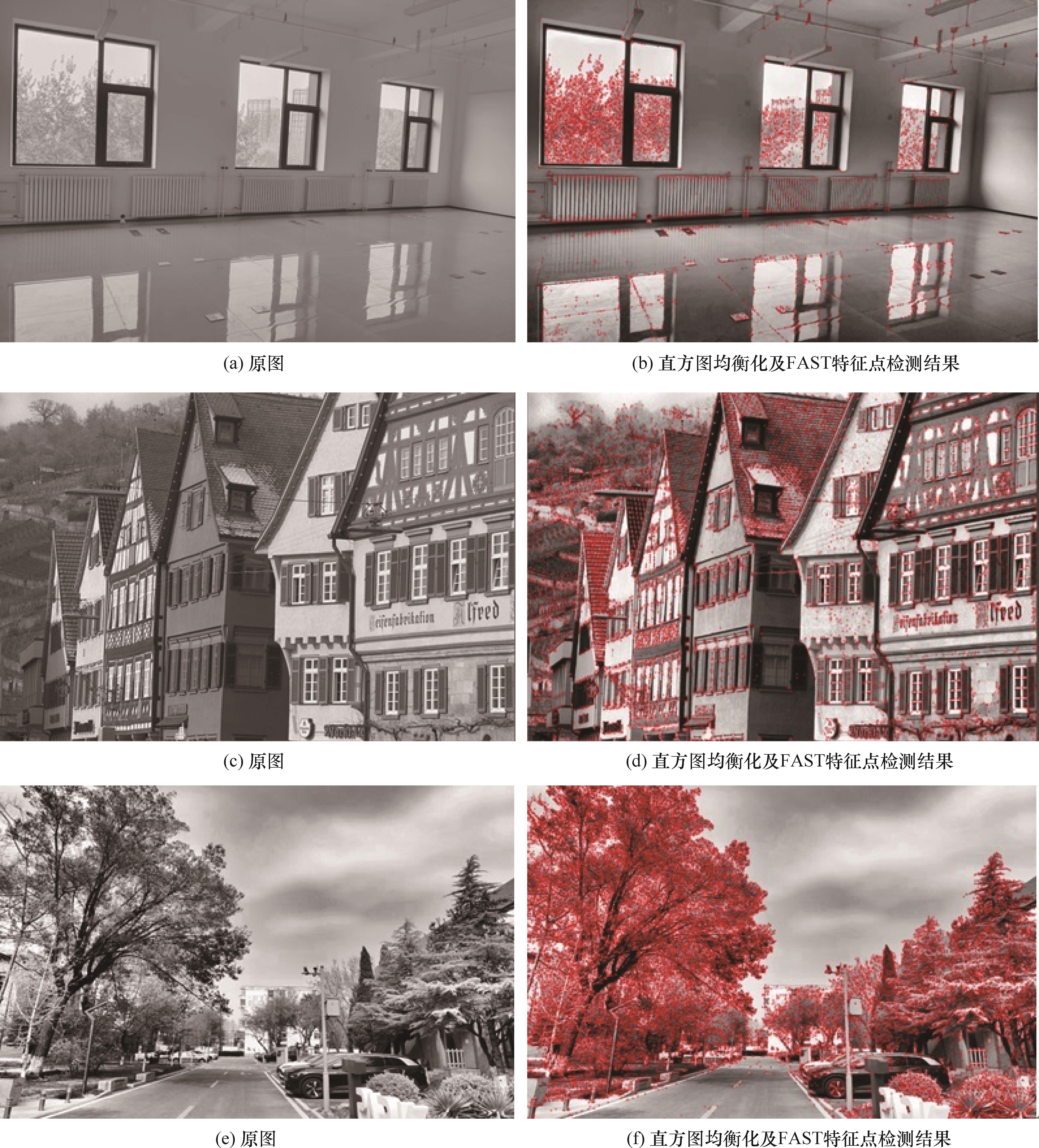
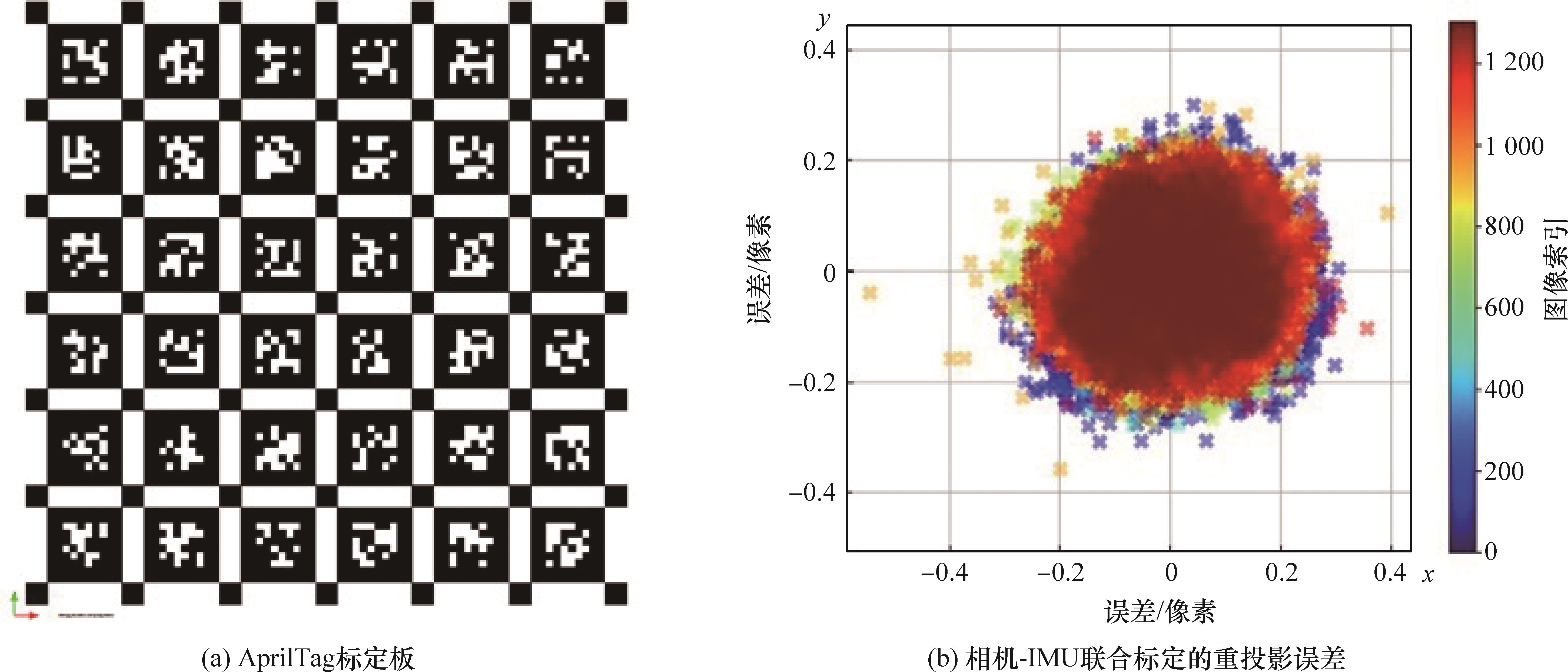
针对视觉导航图像前端的加速处理需求,提出一种基于轻量级、低成本FPGA的图像预处理加速器方案。该方案通过高效的流水线设计以及并行处理技术集成直方图均衡化、FAST特征点检测及多源传感器数据时间同步等关键功能,解决了在有限硬件资源下实现多功能集成、满足实时性要求、平衡成本与性能、多源传感器信息时间同步,以及实现软硬件协同设计等技术难点。该方案基于Xilinx公司Zynq-7000系列轻量级FPGA实现,在实现低成本的同时大大降低了图像处理延迟。当FPGA以160 MHz的频率运行时,对于1 280×720的图像可实现150帧/s的处理速度,提供了一种低成本、高性能的视觉导航图像前端加速解决方案。
中图分类号: