Journal of University of Chinese Academy of Sciences ›› 2026, Vol. 43 ›› Issue (2): 209-217.DOI: 10.7523/j.ucas.2024.045
• Electronics & Computer Science • Previous Articles Next Articles
Cui JIANG, Jianbin JIAO( )
)
Received:2024-01-12
Revised:2024-05-08
Online:2026-03-15
Contact:
Jianbin JIAO
CLC Number:
Cui JIANG, Jianbin JIAO. Knowledge-infused deep learning algorithm for vehicle trajectory prediction[J]. Journal of University of Chinese Academy of Sciences, 2026, 43(2): 209-217.
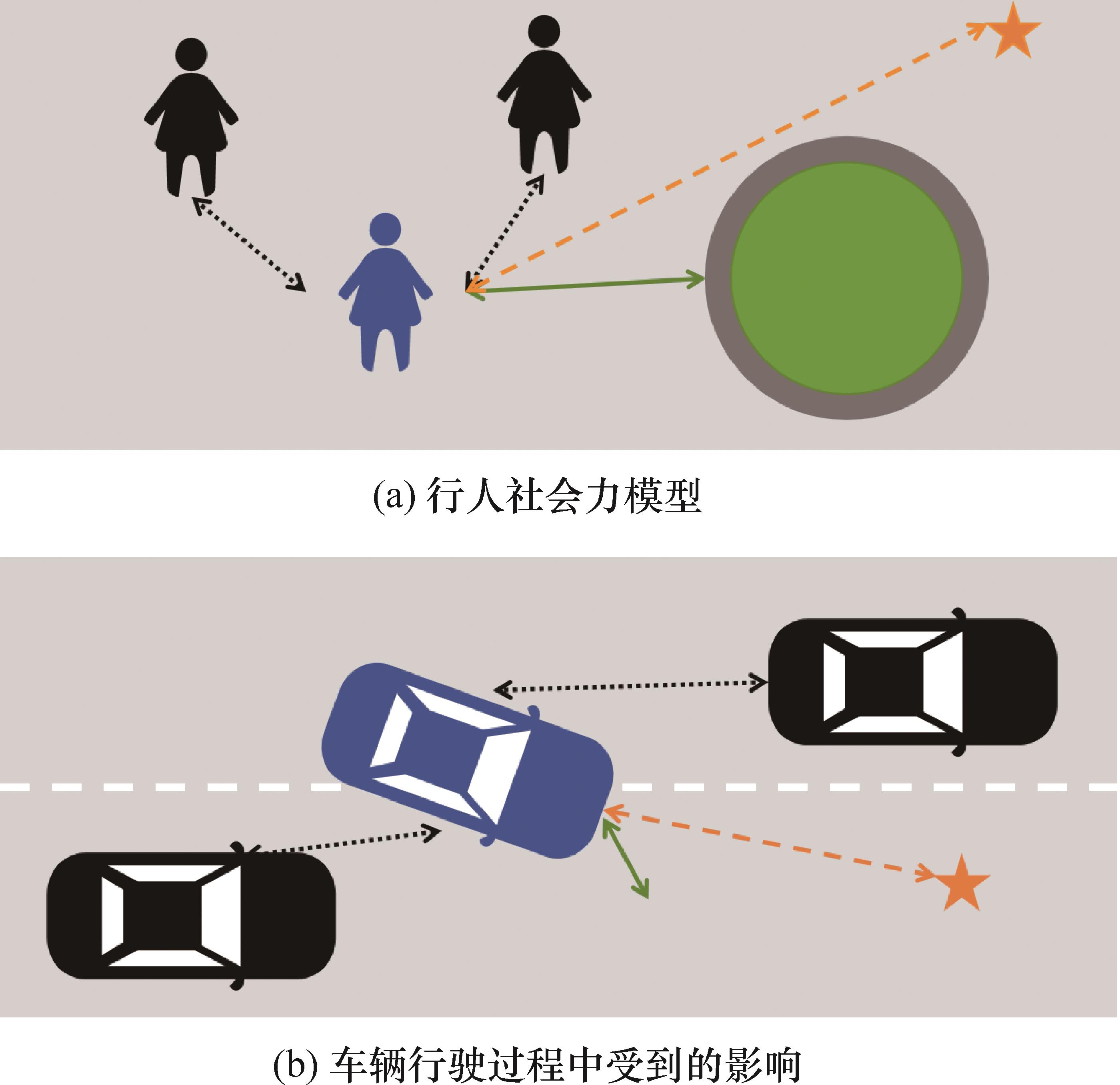
Fig.1 Influences on pedestrians and vehicles
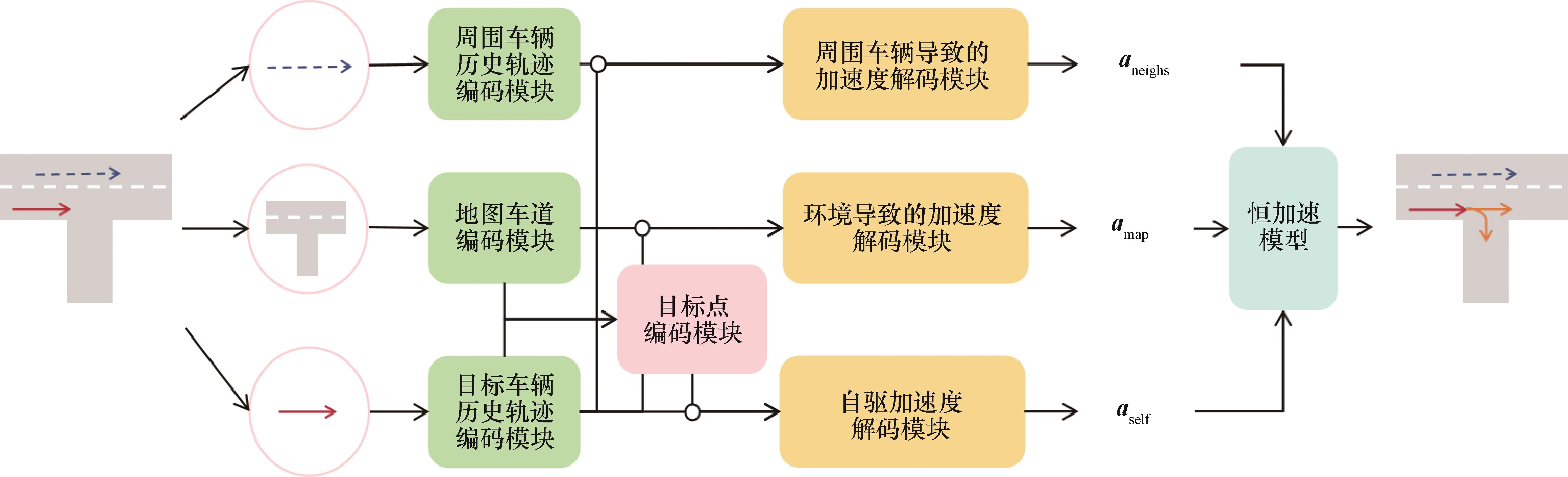
Fig.2 Framework of KIT

Fig.3 Detailed structure of various modules of KIT
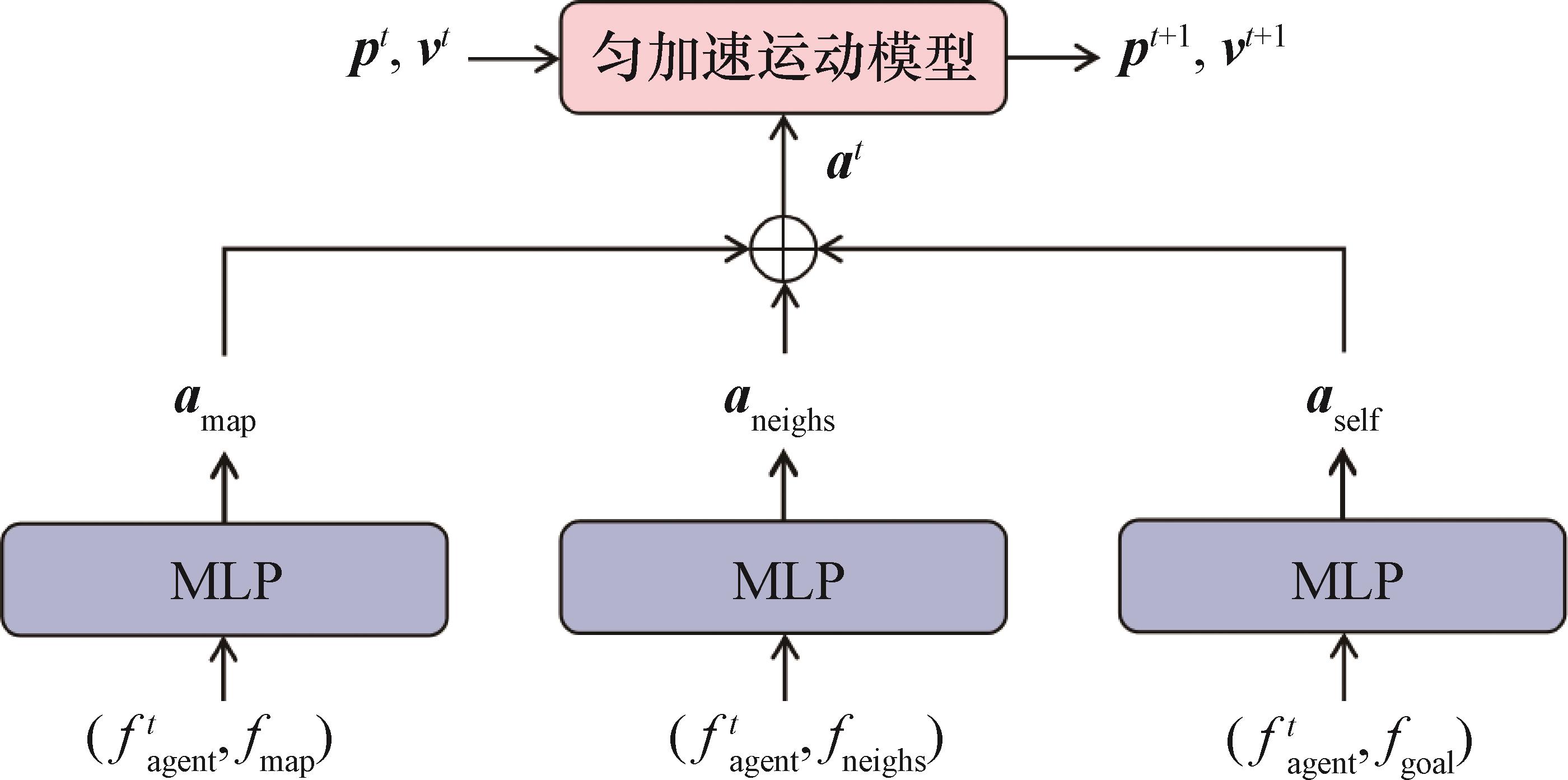
Fig.4 Structure of decoder module
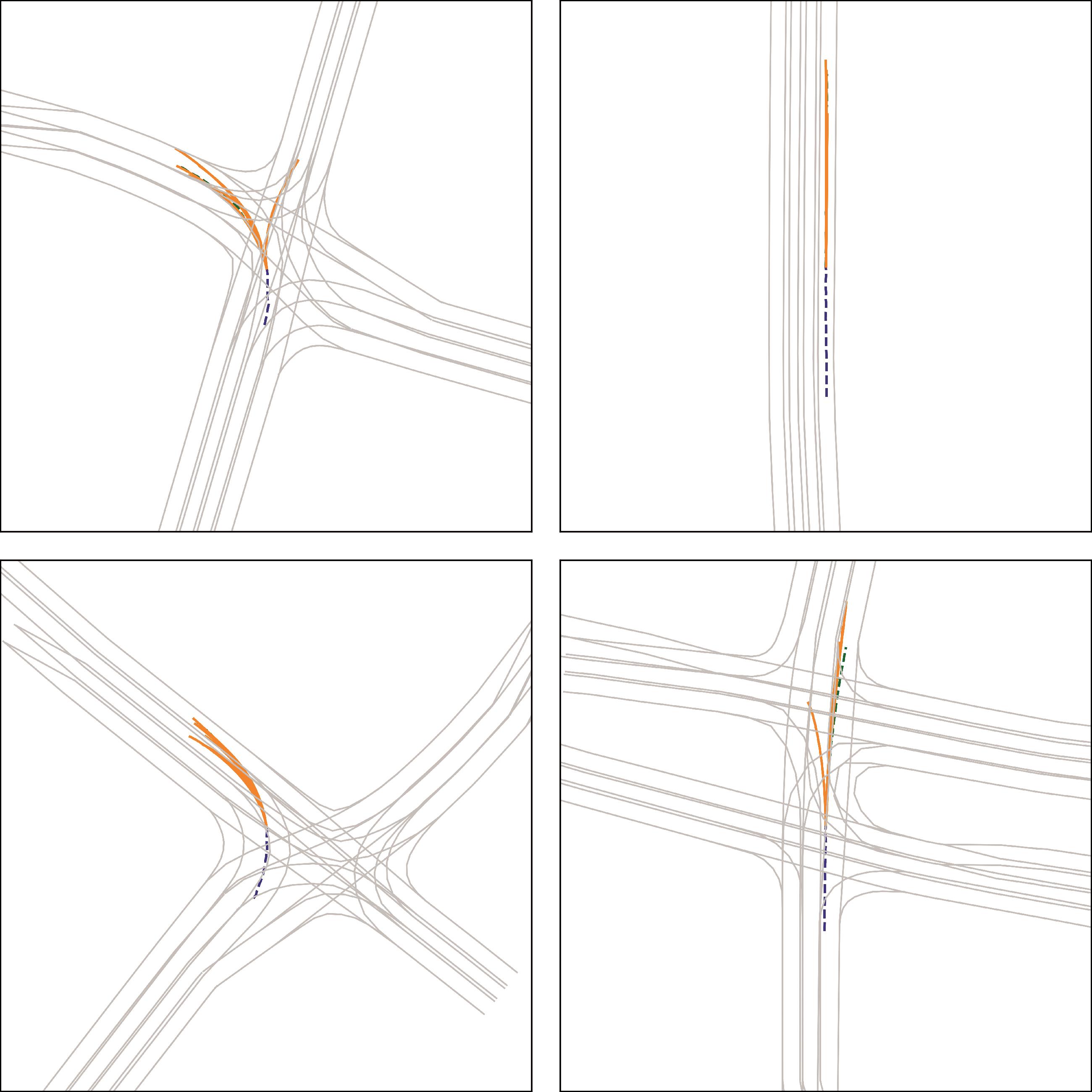
Fig.5 Examples of KIT predictions in Argoverse scenes
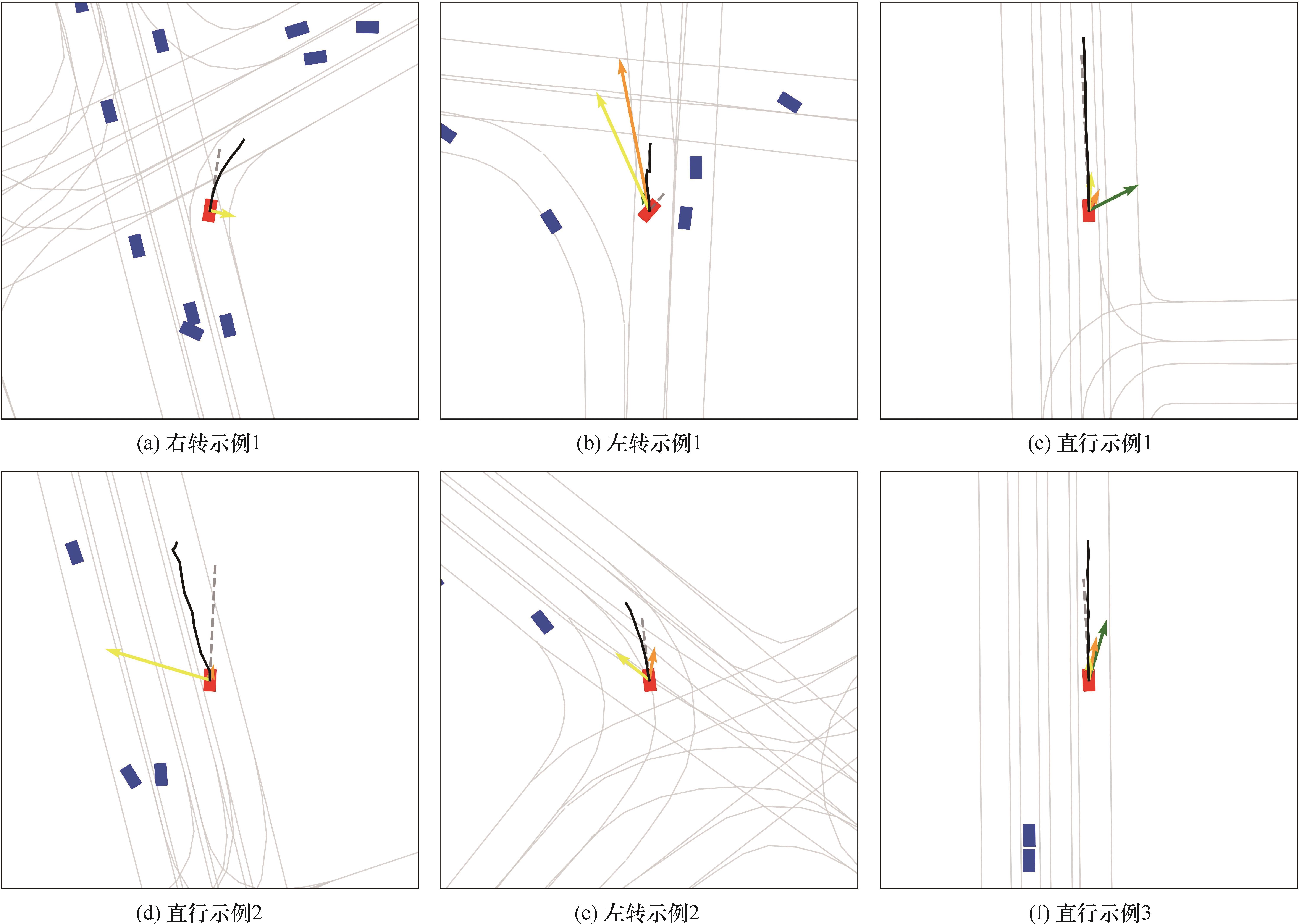
Fig.6 Accelerations of vehicles outputted by KIT in Argoverse scenes, induced by the environment, surrounding vehicles, and self-propulsion
| 模型 | ||||||
|---|---|---|---|---|---|---|
| ADE | FDE | MR/% | minADE | minFDE | MR/% | |
| MultiPath++[ | 1.624 | 3.614 | 56.5 | 0.790 | 1.214 | 13.2 |
| GANet[ | 1.592 | 3.455 | 55.0 | 0.806 | 1.161 | 11.8 |
| HiVT[ | 1.598 | 3.533 | 54.7 | 0.774 | 1.169 | 12.7 |
| Wayformer[ | 1.636 | 3.656 | 57.2 | 0.767 | 1.163 | 11.9 |
| KIT | 1.305 | 2.975 | 52.6 | 0.738 | 1.186 | 12.5 |
Table 1 Results on Argoverse motion forecasting benchmark
| 模型 | ||||||
|---|---|---|---|---|---|---|
| ADE | FDE | MR/% | minADE | minFDE | MR/% | |
| MultiPath++[ | 1.624 | 3.614 | 56.5 | 0.790 | 1.214 | 13.2 |
| GANet[ | 1.592 | 3.455 | 55.0 | 0.806 | 1.161 | 11.8 |
| HiVT[ | 1.598 | 3.533 | 54.7 | 0.774 | 1.169 | 12.7 |
| Wayformer[ | 1.636 | 3.656 | 57.2 | 0.767 | 1.163 | 11.9 |
| KIT | 1.305 | 2.975 | 52.6 | 0.738 | 1.186 | 12.5 |
| 设置 | |||
|---|---|---|---|
| minADE | minFDE | MR/% | |
| 位置 | 0.836 | 1.327 | 15.5 |
| 轨迹 | 0.825 | 1.295 | 13.8 |
| KIT | 0.738 | 1.186 | 12.5 |
Table 2 Results of the ablation experiment
| 设置 | |||
|---|---|---|---|
| minADE | minFDE | MR/% | |
| 位置 | 0.836 | 1.327 | 15.5 |
| 轨迹 | 0.825 | 1.295 | 13.8 |
| KIT | 0.738 | 1.186 | 12.5 |
| [1] | Xie G, Shangguan A Q, Fei R, et al. Motion trajectory prediction based on a cnn-lstm sequential model[J]. Science China Information Sciences, 2020, 63(11): 212207. DOI: 10.1007/s11432-019-2761-y . |
| [2] | Varadarajan B, Hefny A, Srivastava A, et al. Multipath++: efficient information fusion and trajectory aggregation for behavior prediction[C]//2022 International Conference on Robotics and Automation (ICRA). May 23-27, 2022, Philadelphia, PA, USA. IEEE, 2022: 7814-7821. DOI: 10.1109/ICRA46639.2022.9812107 . |
| [3] | Nayakanti N, Al-Rfou R, Zhou A, et al. Wayformer: motion forecasting via simple & efficient attention networks[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). May 29-June 02, 2023, London, United Kingdom. IEEE, 2023: 2980-2987. DOI: 10.1109/ICRA48891.2023.10160609 . |
| [4] | Polychronopoulos A, Tsogas M, Amditis A J, et al. Sensor fusion for predicting vehicles' path for collision avoidance systems[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(3): 549-562. DOI: 10.1109/TITS.2007.903439 . |
| [5] | Barth A, Franke U. Where will the oncoming vehicle be the next second?[C]//2008 IEEE Intelligent Vehicles Symposium. June 04-06, 2008, Eindhoven, Netherlands. IEEE, 2008: 1068-1073. DOI: 10.1109/IVS.2008.4621210 . |
| [6] | Jiang R, Wu Q S. Study on the complex dynamic properties of traffic flow from the micro and macro modelling[J]. Journal of Graduate School of Chinese Academy of Sciences, 2006, 23(6): 848-854. DOI: 10.7523/j.issn.2095-6134.2006.6.021 . |
| [7] | Greer R, Deo N, Trivedi M. Trajectory prediction in autonomous driving with a lane heading auxiliary loss[J]. IEEE Robotics and Automation Letters, 2021, 6(3): 4907-4914. DOI: 10.1109/LRA.2021.3068919 . |
| [8] | Li X, Rosman G, Gilitschenski I, et al. Differentiable logic layer for rule guided trajectory prediction[C]//Conference on Robot Learning. November 16-18, 2020, Cambridge, MA, USA. PMLR, 2021: 2178-2194. |
| [9] | Bahari M, Nejjar I, Alahi A. Injecting knowledge in data-driven vehicle trajectory predictors[J]. Transportation Research Part C: Emerging Technologies, 2021, 128: 103010. DOI: 10.1016/j.trc.2021.103010 . |
| [10] | Schlauch C, Wirth C, Klein N. Informed priors for knowledge integration in trajectory prediction[C]//Joint European Conference on Machine Learning and Knowledge Discovery in Databases. September 18-22, 2023, Turin, Italy. Cham: Springer, 2023: 392-407. DOI: 10.1007/978-3-031-43424-2_24 . |
| [11] | Helbing D, Molnár P. Social force model for pedestrian dynamics[J]. Physical Review. E, Statistical Physics, Plasmas, Fluids, and Related Interdisciplinary Topics, 1995, 51(5): 4282-4286. DOI: 10.1103/physreve.51.4282 . |
| [12] | Yang D F, Özgüner Ü, Redmill K. Social force based microscopic modeling of vehicle-crowd interaction[C]//2018 IEEE Intelligent Vehicles Symposium (IV). June 26-30, 2018, Changshu, China. IEEE, 2018: 1537-1542. DOI: 10.1109/IVS.2018.8500499 . |
| [13] | Rinke N, Schiermeyer C, Pascucci F, et al. A multi-layer social force approach to model interactions in shared spaces using collision prediction[J]. Transportation Research Procedia, 2017, 25: 1249-1267. DOI: 10.1016/j.trpro.2017.05.144 . |
| [14] | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]//Advances In Neural Information Processing Systems 30: Annual Conference On Neural Information Processing Systems 2017. December 4-9, 2017, Long Beach, CA, USA. 2017: 5998-6008. DOI: 10.48550/arXiv.1706.03762 . |
| [15] | Wang M K, Zhu X G, Yu C Q, et al. Ganet: goal area network for motion forecasting[C]//2023 IEEE International Conference on Robotics and Automation (ICRA). May 29-June 02, 2023, London, United Kingdom. IEEE, 2023: 1609-1615. DOI: 10.1109/ICRA48891.2023.10160468 . |
| [16] | Zhou Z K, Ye L Y, Wang J P, et al. Hivt: hierarchical vector transformer for multi-agent motion prediction[C]//2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR). June 18-24, 2022, New Orleans, LA, USA. IEEE, 2022: 8813-8823. DOI: 10.1109/CVPR52688.2022.00862 . |
| [17] | Huang Y J, Du J T, Yang Z R, et al. A survey on trajectory-prediction methods for autonomous driving[J]. IEEE Transactions on Intelligent Vehicles, 2022, 7(3): 652-674. DOI: 10.1109/TIV.2022.3167103 . |
| [18] | Gupta A, Johnson J, Li F F, et al. Social GAN: socially acceptable trajectories with generative adversarial networks[C]//2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR). June 18-23, 2018, Salt Lake City, UT, USA. IEEE, 2018: 2255-2264. DOI: 10.1109/CVPR.2018.00240 . |
| [19] | Gu J R, Sun C, Zhao H. Densetnt: end-to-end trajectory prediction from dense goal sets[C]//2021 IEEE/CVF International Conference on Computer Vision(ICCV). October 10-17, 2021, Montreal, QC, Canada. IEEE, 2021: 15283-15292. DOI: 10.1109/ICCV48922.2021.01502 . |
| [20] | Park D, Ryu H, Yang Y, et al. Leveraging future relationship reasoning for vehicle trajectory prediction[EB/OL]. arXiv 2023:2305.14715.(2023-05-24)[2024-04-30]. . |
| [21] | Ye M S, Xu J M, Xu X N, et al. Bootstrap motion forecasting with self-consistent constraints[C]//2023 IEEE/CVF International Conference on Computer Vision(ICCV). June 18-22, 2023, Paris, France. IEEE, 2023: 8470-8480. DOI: 10.1109/ICCV51070.2023.00781 . |
| [22] | Deo N, Wolff E M, Beijbom O. Multimodal trajectory prediction conditioned on lane-graph traversals[C]//Proceedings of the 5th Conference on Robot Learning(CoRL). November 8-11, 2021, London, UK. PMLR, 2022: 203-212. DOI: 10.48550/arXiv.2106.15004 . |
| [23] | Wang Y T, Zhou H N, Zhang Z G, et al. Tenet: transformer encoding network for effective temporal flow on motion prediction[EB/OL]. arXiv 2022:2207.00170.(2022-06-30)[2024-04-30]. . |
| [24] | Chang M F, Lambert J, Sangkloy P, et al. Argoverse: 3d tracking and forecasting with rich maps[C]//2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition(CVPR). June 27-30, 2019, Long Beach, CA, USA. IEEE, 2019: 8740-8749. DOI:10.1109/CVPR.2019.00895 . |
| [1] | Ruiqi SUN, Wenjuan ZHANG, Zhen LI, Xuesong MA, Junlin MEI. Effect of patch size on super-resolution of large scene remote sensing images [J]. Journal of University of Chinese Academy of Sciences, 2026, 43(1): 93-103. |
| [2] | ZHOU Qingze, GUO Qing. Multispectral remote sensing image pan-sharpening method based on multi-residual network [J]. Journal of University of Chinese Academy of Sciences, 2025, 42(4): 565-575. |
| [3] | ZENG Jianshun, LYU Yanjie, QIN Yuchu. Multi-scale semantic prior features guided street view image inpainting algorithm [J]. Journal of University of Chinese Academy of Sciences, 2025, 42(4): 496-507. |
| [4] | ZHONG Jinyan, CHEN Jun, LI Yu, WU Yewei, GE Xiaoqing. Cross-modal retrieval method based on MFF-SFE for remote sensing image-text [J]. Journal of University of Chinese Academy of Sciences, 2025, 42(2): 236-247. |
| [5] | ZHOU Wenxue, ZHANG Huachun. Lightweight network for fast ship detection in SAR images [J]. Journal of University of Chinese Academy of Sciences, 2024, 41(6): 776-785. |
| [6] | CHEN Jingwei, LI Yu, CHEN Jun, ZHANG Hongqun. Building extraction method based on MFF-Deeplabv3+ network for high-resolution remote sensing images [J]. Journal of University of Chinese Academy of Sciences, 2024, 41(5): 654-664. |
| [7] | YU Yongsheng, LUO Tiejian. Seamless image completion via GAN inversion [J]. Journal of University of Chinese Academy of Sciences, 2024, 41(5): 705-714. |
| [8] | HUANG Yulin, LIANG Lei, LI Weijun, XI Xiaohuan. Point cloud compression of deep learning based on multi-scale feature and attention mechanism [J]. Journal of University of Chinese Academy of Sciences, 2024, 41(5): 687-694. |
| [9] | LIN Yutong, WANG Hong, CHAI Tuanyao. Multi-scale featured convolution neural network-based soybean phenotypic prediction [J]. Journal of University of Chinese Academy of Sciences, 2024, 41(4): 468-476. |
| [10] | XIAO Jun, SHI Guangtian. Three-dimensional point cloud denoising [J]. Journal of University of Chinese Academy of Sciences, 2023, 40(5): 577-595. |
| [11] | SHENG Xiaoguang, WANG Ying, ZHANG Yingwei, XIANG Ruoxi, FU Hongping. A weighted incremental learning scheme for effective academic warning [J]. Journal of University of Chinese Academy of Sciences, 2023, 40(3): 422-432. |
| [12] | YAO Mufeng, ZAN Luyang, LI Baipeng, LI Qingting, CHEN Zhengchao. Building change detection from remote sensing images using CAR-Siamese net [J]. Journal of University of Chinese Academy of Sciences, 2023, 40(3): 380-387. |
| [13] | CHEN Ruonan, PENG Ling, LIU Yufei, WEI Zhichao, LYU Beiru, CHEN Deyue. Road information extraction and application in the suburban mountainous area based on remote sensing images [J]. Journal of University of Chinese Academy of Sciences, 2022, 39(5): 658-667. |
| [14] | GU Yumin, YAN Fuli. Building extraction based on UNet++ network with different backbones [J]. Journal of University of Chinese Academy of Sciences, 2022, 39(4): 512-523. |
| [15] | LIN Daquan, FAN Rui, ZHANG Liangfeng. Image adversarial attack algorithm based on high-dimensional feature [J]. Journal of University of Chinese Academy of Sciences, 2022, 39(3): 421-431. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||
Copyright © Journal of University of Chinese Academy of Sciences
Support by Beijing Magtech Co.ltd support@magtech.com.cn